




Bộ điều khiển phân cực bộ điều biến DP-IQ siêu nhỏ gọn, bộ điều khiển phân cực tự động


Tính năng
• Đồng thời cung cấp sáu điện áp phân cực tự động cho bộ điều biến IQ phân cực kép.
•Định dạng điều chế độc lập:
Đã xác nhận SSB, QPSK, QAM, OFDM.
•Cắm là chạy:
Không cần hiệu chỉnh thủ công. Mọi thứ đều tự động.
• Các nhánh I, Q: điều khiển ở chế độ Đỉnh và Điểm không. Tỷ lệ triệt tiêu cao: 50dB tối đa.
•Cánh tay P: điều khiển ở chế độ Q+ và Q- Độ chính xác: ± 2◦
•Thiết kế nhỏ gọn: 40mm (chiều rộng) × 29mm (chiều sâu) × 8mm (chiều cao)
• Độ ổn định cao: triển khai hoàn toàn bằng kỹ thuật số. Dễ sử dụng:
•Vận hành thủ công với cầu nối mini 2
Vận hành OEM linh hoạt thông qua UART/IO
• Hai chế độ cung cấp điện áp phân cực: a. Điều khiển phân cực tự động b. Điện áp phân cực do người dùng xác định

Ứng dụng
•LiNbO3 và các chất điều biến DP-IQ khác
•Truyền dẫn đồng bộ
1Tỷ lệ triệt tiêu cao nhất phụ thuộc vào và không thể vượt quá 1 tỷ lệ triệt tiêu tối đa của bộ điều biến hệ thống.
2Chức năng UART chỉ khả dụng trên một số phiên bản của bộ điều khiển.
Hiệu suất
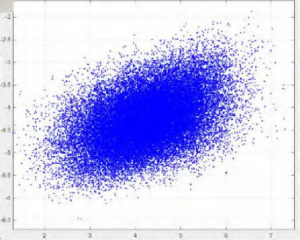
Hình 1. Sơ đồ chòm sao (không có bộ điều khiển)
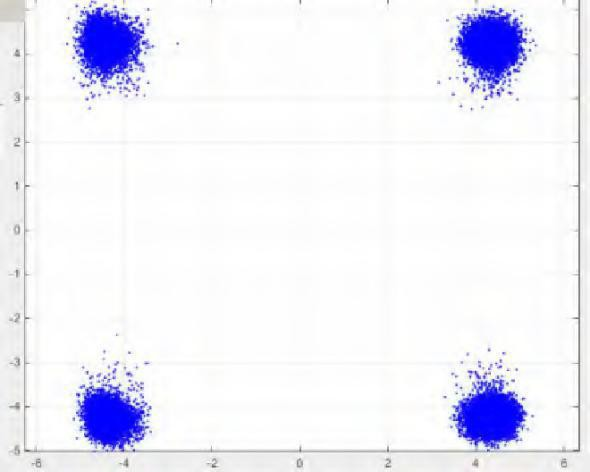
Hình 2. Sơ đồ chòm sao QPSK (có bộ điều khiển)
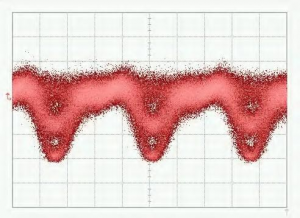
Hình 3. Mẫu QPSK-Eye
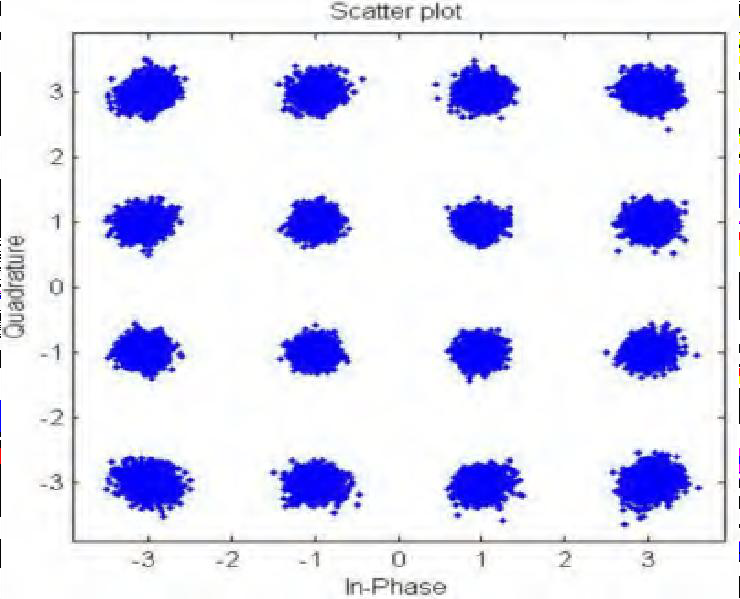
Hình 5. Mô hình chòm sao 16-QAM
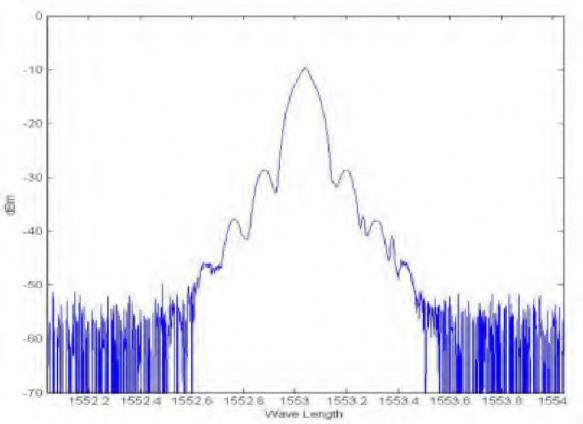
Hình 4. Phổ QPSK

Hình 6. Phổ CS-SSB
Thông số kỹ thuật
| Tham số | Tối thiểu | Typ | Tối đa | Đơn vị |
| Kiểm soát hiệu suất | ||||
| Các nhánh I, Q được điều khiển trênGiá trị rỗng (tối thiểu)or Đỉnh (Cực đại)điểm | ||||
| Tỷ lệ tuyệt chủng | MER1 | 50 | dB | |
| Cánh tay P được điều khiển trênQ+(phép tích phân bên phải)or Q-(phép bình phương bên trái)điểm | ||||
| Độ chính xác tại Quad | −2 | +2 | bằng cấp2 | |
| Thời gian ổn định | 45 | 50 | 55 | s |
| Điện | ||||
| Điện áp nguồn dương | +14,5 | +15 | +15,5 | V |
| Dòng điện công suất dương | 20 | 30 | mA | |
| Điện áp nguồn âm | -15,5 | -15 | -14,5 | V |
| Dòng điện công suất âm | 8 | 15 | mA | |
| Dải điện áp đầu ra của YI/YQ/XI/XQ | -14,5 | +14,5 | V | |
| Dải điện áp đầu ra của YP/XP | -13 | +13 | V | |
| Biên độ dao động | 1%Vπ | V | ||
| Quang học | ||||
| Công suất quang đầu vào3 | -30 | -8 | dBm | |
| Bước sóng đầu vào | 1100 | 1650 | nm | |
1 MER đề cập đến Tỷ lệ suy giảm điều biến nội tại. Tỷ lệ suy giảm đạt được thường là tỷ lệ suy giảm của bộ điều biến được chỉ định trong bảng dữ liệu của bộ điều biến.
2Cho phépVπ ký hiệu điện áp phân cực ở 180◦ VàVP ký hiệu điện áp phân cực tối ưu nhất tại các điểm Quad.
3Xin lưu ý rằng công suất quang đầu vào không đề cập đến công suất quang tại điểm phân cực đã chọn. Đó là công suất quang tối đa mà bộ điều biến có thể xuất ra bộ điều khiển khi điện áp phân cực nằm trong khoảng từ...−Vπ đến +Vπ .
Giao diện người dùng
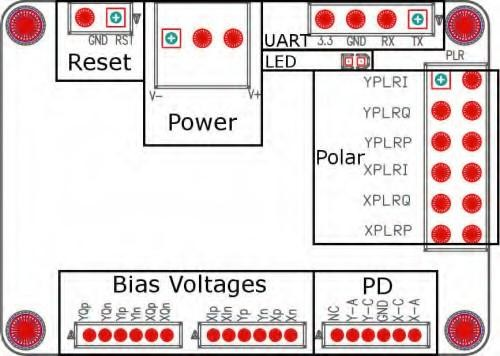
Hình 5. Lắp ráp
| Nhóm | Hoạt động | Giải thích |
| Nghỉ ngơi | Cắm dây nối vào và rút ra sau 1 giây. | Đặt lại bộ điều khiển |
| Quyền lực | Nguồn điện cho bộ điều khiển độ lệch | V- kết nối với cực âm của nguồn điện. |
| V+ kết nối với cực dương của nguồn điện. | ||
| Cổng giữa được kết nối với điện cực nối đất. | ||
| UART | Vận hành bộ điều khiển thông qua UART | 3.3: Điện áp tham chiếu 3.3V |
| GND: Nối đất | ||
| RX: Bộ điều khiển nhận tín hiệu | ||
| TX: Truyền tín hiệu điều khiển | ||
| DẪN ĐẾN | Luôn luôn hoạt động | Làm việc trong trạng thái ổn định |
| Bật-tắt hoặc tắt-bật mỗi 0,2 giây | Xử lý dữ liệu và tìm kiếm điểm kiểm soát | |
| Bật-tắt hoặc tắt-bật mỗi 1 giây | Công suất quang đầu vào quá yếu | |
| Bật-tắt hoặc tắt-bật mỗi 3 giây | Công suất quang đầu vào quá mạnh | |
| Cực1 | XPLRI: Cắm hoặc rút dây nối | Không có cầu nối: Chế độ Null; có cầu nối: Chế độ Peak |
| XPLRQ: Cắm hoặc rút dây nối | Không có cầu nối: Chế độ Null; có cầu nối: Chế độ Peak | |
| XPLRP: Cắm hoặc rút dây nối | Không có cầu nối: Chế độ Q+; có cầu nối: Chế độ Q- | |
| YPLRI: Chèn hoặc rút dây nối | Không có cầu nối: Chế độ Null; có cầu nối: Chế độ Peak | |
| YPLRQ: Cắm hoặc rút dây nối | Không có cầu nối: Chế độ Null; có cầu nối: Chế độ Peak | |
| YPLRP: Cắm hoặc rút dây nối | Không có cầu nối: Chế độ Q+; có cầu nối: Chế độ Q- | |
| Điện áp phân cực | YQp, YQn: Điện áp phân cực cho nhánh Q phân cực Y | YQp: Cực dương; YQn: Cực âm hoặc nối đất. |
| YIp, YIn: Độ lệch cho phân cực Y nhánh I | Yip: Mặt dương; Yin: Mặt âm hoặc mặt đất | |
| XQp, XQn: Điện áp phân cực cho nhánh Q phân cực X | XQp: Cực dương; XQn: Cực âm hoặc nối đất. | |
| XIp, XIn: Độ lệch cho phân cực X nhánh I | XIp: Cực dương; XIn: Cực âm hoặc nối đất | |
| YPp, YPn: Điện áp phân cực cho nhánh P phân cực Y | YPp: Cực dương; YPn: Cực âm hoặc nối đất. | |
| XPp, XPn: Độ lệch cho nhánh P phân cực X | XPp: Cực dương; XPn: Cực âm hoặc nối đất |
1. Cực tính phụ thuộc vào tín hiệu RF của hệ thống. Khi không có tín hiệu RF trong hệ thống, cực tính phải dương. Khi tín hiệu RF có biên độ lớn hơn một mức nhất định, cực tính sẽ chuyển từ dương sang âm. Lúc này, điểm không (Null point) và điểm đỉnh (Peak point) sẽ hoán đổi vị trí cho nhau. Điểm Q+ và điểm Q- cũng sẽ hoán đổi vị trí cho nhau. Công tắc cực tính cho phép người dùng thay đổi...
Cực tính trực tiếp mà không cần thay đổi điểm thao tác.
| Nhóm | Hoạt động | Giải thích |
| PD1 | NC: Không kết nối | |
| YA: Điốt quang phân cực Y Anode | YA và YC: Phản hồi dòng quang điện phân cực Y | |
| YC: Điốt quang phân cực Y - Cực âm | ||
| GND: Nối đất | ||
| XC: Điốt quang phân cực X - Cực âm | XA và XC: Phản hồi dòng quang điện phân cực X | |
| XA: Điốt quang phân cực X Anode |
1. Chỉ được chọn một trong hai lựa chọn: sử dụng điốt quang điều khiển hoặc sử dụng điốt quang điều biến. Nên sử dụng điốt quang điều khiển cho các thí nghiệm trong phòng thí nghiệm vì hai lý do. Thứ nhất, điốt quang điều khiển có chất lượng đảm bảo. Thứ hai, việc điều chỉnh cường độ ánh sáng đầu vào dễ dàng hơn. Nếu sử dụng điốt quang bên trong của bộ điều biến, hãy đảm bảo rằng dòng điện đầu ra của điốt quang tỷ lệ thuận với công suất đầu vào.
Công ty Rofea Optoelectronics cung cấp dòng sản phẩm thương mại gồm các bộ điều biến điện quang, bộ điều biến pha, bộ điều biến cường độ, bộ tách sóng quang, nguồn sáng laser, laser DFB, bộ khuếch đại quang, EDFA, laser SLD, điều chế QPSK, laser xung, bộ dò ánh sáng, bộ tách sóng quang cân bằng, bộ điều khiển laser, bộ khuếch đại sợi quang, máy đo công suất quang, laser băng rộng, laser điều chỉnh được, bộ dò quang, bộ điều khiển diode laser, bộ khuếch đại sợi quang. Chúng tôi cũng cung cấp nhiều bộ điều biến đặc biệt để tùy chỉnh, chẳng hạn như bộ điều biến pha mảng 1*4, bộ điều biến Vpi cực thấp và bộ điều biến tỷ lệ triệt tiêu cực cao, chủ yếu được sử dụng trong các trường đại học và viện nghiên cứu.
Hi vọng sản phẩm của chúng tôi sẽ hữu ích cho bạn và công trình nghiên cứu của bạn.


